
Table of Contents
TogglePID controllers are used everywhere in industry to control important process parameters like pressure, temperature, flow, and level.
Most students learn PID as a simple concept made of Proportional, Integral, and Derivative actions, and it looks easy in theory.
But when you enter real industrial systems, you will notice that PID controllers do not always behave the same way.
The reason is simple different controllers use different PID equation forms. Because of this, the same tuning values can give completely different results in different controllers.
This is one of the most common reasons for confusion during tuning and troubleshooting.
In this article, we will understand the three main types of PID controllers—Parallel, Ideal, and Series—in a simple way so that you can clearly understand their behavior and use them confidently in real applications.
1. Parallel PID Controller
The Parallel PID controller is the simplest and most commonly used form of PID equation. In this type, the Proportional (P), Integral (I), and Derivative (D) actions are written as separate terms, and the final controller output is obtained by simply adding these three actions together.
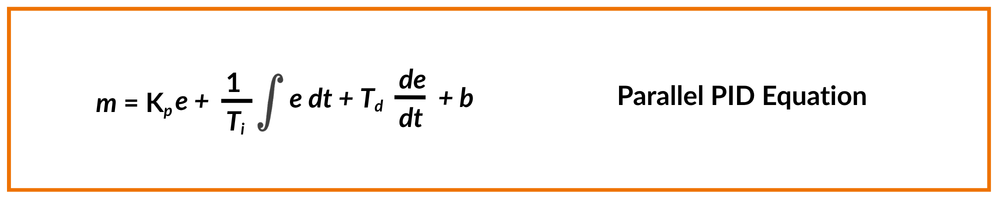
In this equation, each parameter Kp, τi, and τd works independently of the others. This means that when you adjust one parameter, it only affects its own control action and does not directly influence the other two.
At first, this appears to be a major advantage because tuning becomes straightforward and easy to understand.
But, in practical applications, there are situations where it is actually beneficial for the gain (Kp) to influence all three control actions instead of acting independently.
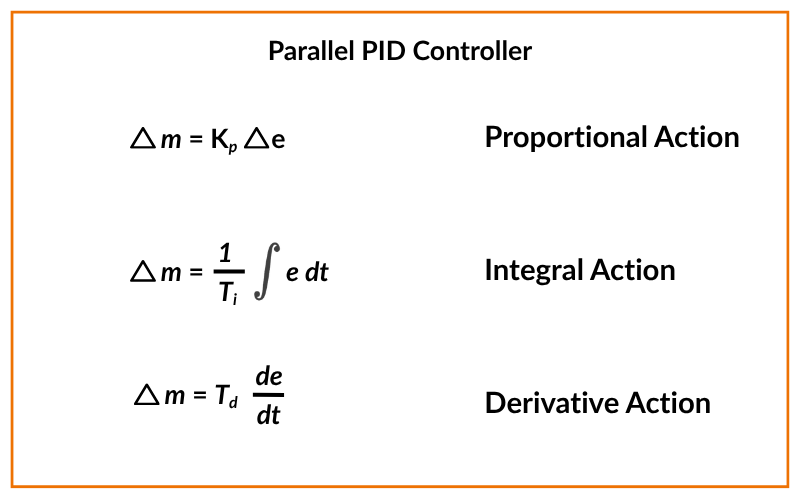
If you look at the equation closely, it can be divided into three separate parts, each contributing individually to the controller output (∆m).
One part represents proportional action, one represents integral action, and the third represents derivative action. All three contributions are completely independent of each othe
Let us take an example: Suppose a technician changes the range of a transmitter, either increasing or decreasing its span. This change affects the overall loop gain of the system, and the controller needs to be re-tuned to maintain stable performance.
If the controller uses the Parallel PID form, the technician must adjust all three parameters P, I, and D in the correct proportion to restore stability.
This makes the tuning process more time-consuming and increases the chances of error.
On the other hand, if the controller is designed in such a way that Kp influences all three control actions, then only Kp needs to be adjusted to bring the loop back to stable operation.
This clearly shows that while the Parallel PID form is simple and easy to understand, it may not always be the most practical choice in real industrial applications.
2. Ideal PID Controller
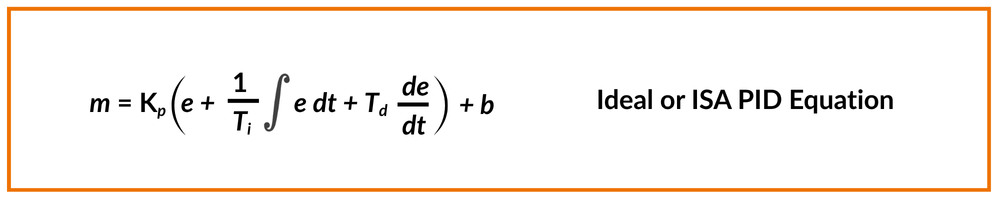
The Ideal PID controller, also known as the ISA form, is an improved version of the PID equation where the proportional gain (Kp) affects all three control actions together. In this structure, the gain is applied to the entire equation instead of just one term.
This means that Kp is distributed across the proportional, integral, and derivative parts equally. As a result, when you increase Kp, all three actions P, I, and D become more aggressive at the same time.
If you observe the equation closely, it can still be divided into three parts, each contributing to the controller output (∆m). However, unlike the parallel form, all three parts are influenced by the same gain (Kp) due to its distribution across the equation.
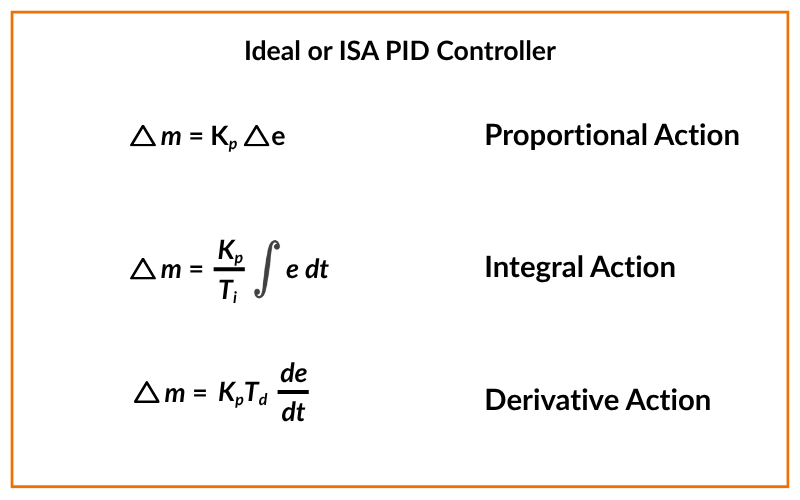
At the same time, the integral time (τi) and derivative time (τd) remain independent within their respective terms.
This means that while Kp controls the overall strength of the controller, τi and τd still define how the integral and derivative actions behave individually.
This structure makes the Ideal PID controller more practical in real industrial applications, especially when system conditions change, because adjusting a single parameter (Kp) can proportionally influence the overall controller response.
Series PID Controller
The Series PID controller, also known as the Interacting form, is another version of the PID equation that originated from older pneumatic and analog electronic controllers.
Unlike the previous forms, this structure introduces interaction between the control actions, which makes its behavior slightly more complex.
In this type of controller, the proportional gain (Kp) affects all three actions P, I, and D similar to the Ideal PID form.
The key difference is that the integral time (τi) and derivative time (τd) also influence the proportional action.
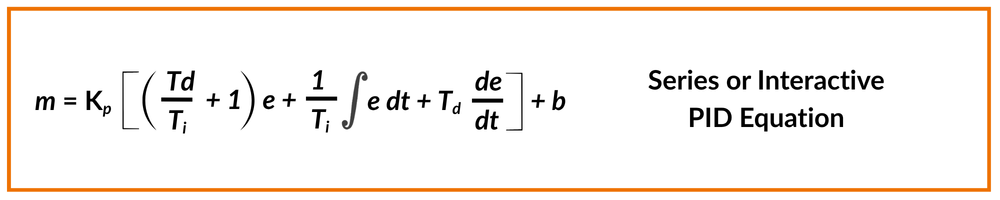
This means that adjusting τi or τd does not only change the integral or derivative response, but it also changes how aggressively the proportional action behaves. In simple terms, all three parameters are interconnected.
If you see below equation, it can still be broken down into different parts contributing to the controller output (∆m).
However, unlike the parallel form, these parts are not independent, and unlike the ideal form, the interaction goes beyond just the gain.
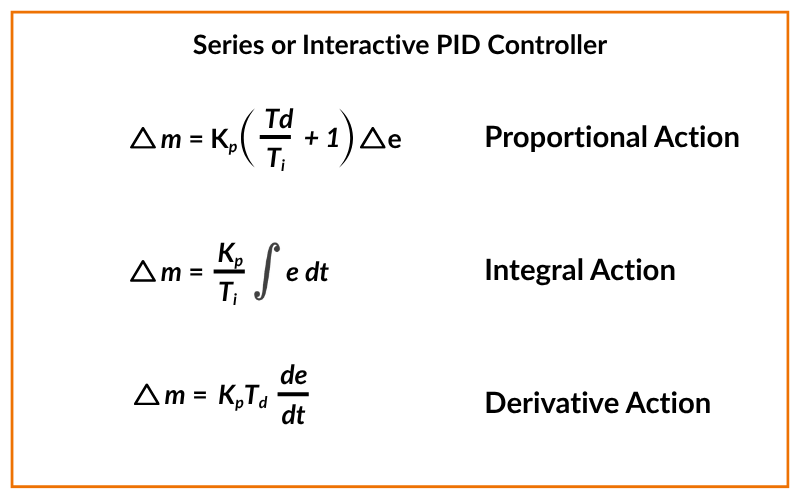
This leads to the following behavior:
- Changing τi affects both integral and proportional actions
- Changing τd affects both derivative and proportional actions
- Changing Kp affects all three actions
The reason this equation form exists goes back to the design of early controllers. In pneumatic and analog electronic systems, integral and derivative functions were often added as separate hardware modules. To simplify the physical design and reduce complexity, the control structure naturally developed interaction between these actions.
Even though modern controllers are digital and do not have these hardware limitations, many still use the Series PID form.
This is done to ensure compatibility with older systems. When replacing a legacy controller, engineers can use the same tuning parameters in the new controller and achieve similar performance.
One important point to remember is that while the gain (Kp) influences all parts of the equation, the proportional action is also affected by the values of τi and τd.
This makes tuning more sensitive compared to other PID forms, and it requires a better understanding of how parameters interact.
Because of this interaction, the Series PID controller is powerful but requires careful tuning, especially in critical industrial processes.
What we learn today?
Understanding different PID controller forms is very important for anyone working in instrumentation and process control.
Although Parallel, Ideal, and Series PID controllers all use the same P, I, and D concepts, their internal behavior is different.
This difference directly affects tuning, stability, and overall process performance. The Parallel form is simple and easy to learn, the Ideal form is more practical and widely used in modern systems, and the Series form is mainly used for compatibility with older controllers.
Once you clearly understand these three types, tuning and troubleshooting PID loops becomes much easier and more logical.
Frequently Asked Questions (FAQs)
1. What are the main types of PID controllers?
The three main types of PID controllers are Parallel PID, Ideal (ISA) PID, and Series (Interacting) PID. Each type uses a different equation structure, which changes how the controller behaves.
2. Which PID form is most commonly used in industry?
The Ideal (ISA) PID controller is most commonly used in modern digital controllers because it allows easier tuning and better scalability.
3. Why does the Series PID controller have interaction between parameters?
The Series PID form was developed from older pneumatic and analog controllers, where hardware design caused the parameters to interact with each other.
4. Can the same tuning values be used for different PID types?
No, the same tuning values may give different results in different PID forms because each equation behaves differently.
5. Why is the Parallel PID controller not always preferred?
Although it is simple and easy to understand, it requires adjusting P, I, and D separately during process changes, which makes tuning more time-consuming.
6. What should be checked before tuning a PID controller?
Before tuning, you should always check the type of PID equation used in the controller, because it directly affects how the parameters behave.


I hope you like above blog. There is no cost associated in sharing the article in your social media. Thanks for Reading !! Happy Learning
3 Comments